공유하기
막힌 심혈관 뚫는 4mm 마이크로로봇 국내연구진이 개발
- 뉴스1
-
입력 2019년 2월 27일 10시 51분
글자크기 설정
DGIST 연구진 개발…가이드와이어에 로봇 부착 가능
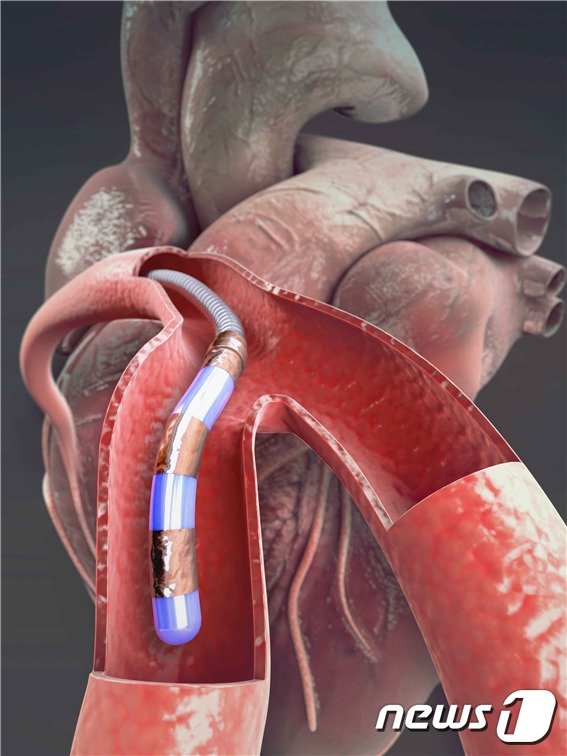
국내 연구진이 복잡한 심장혈관에서도 조향과 이동이 가능한 마이크로로봇을 개발했다. 연구진은 현재 동물들을 대상으로 이 로봇의 성능을 시험하고 있다.
최홍수 대구경북과학기술원(DGIST) 로봇공학전공 교수팀은 이병주 한양대 교수·브래들리 넬슨 스위스취리히연방공대 교수와 공동으로 심근경색 가운데 ‘만성완전폐쇄병변’(CTO) 치료 성공률을 높일 수 있는 ‘가이드와이어 부착형 마이크로로봇’을 개발했다고 27일 밝혔다.
가이드와이어는 막힌 혈관을 뚫어주는 관상동맥 중재술에 사용되는 것이다. 그러나 이 와이어는 사람이 직접 방향과 위치를 제어하기 때문에 시술자 숙련도에 따라 성공률이 크게 차이났다. 특히 복잡한 혈관이나 분지관에서 끝단이 구부러진 가이드와이어를 사람이 제어한다는 것은 쉽지 않은 일이다.
연구팀은 마이크로로봇이 비선형적으로 변형될 수 있도록 하기 위해 로봇 움직임을 수학적으로 계산하고 예측해서 그 결과를 제어하는 ‘피드포워드 방식’을 적용했다. 이같은 방식이 적용된 로봇은 복잡한 혈관을 통과하는 실험에 성공했다. 심장의 관상동맥을 모사한 3차원 혈관 모형에서 원하는 부위에 도달하는 실험도 성공했다. 세포 생존 실험을 통한 마이크로로봇의 생체적합성도 확인했다.
연구팀은 현재 로봇의 동물실험을 진행하고 있으면 임상시험까지 성공적으로 진행될 경우 상용화에 나설 계획이다. 최홍수 교수는 “가이드와이어 부착형 마이크로로봇을 이용하면 정확하고 빠르게 찾아 안정적으로 시술할 수 있다”면서 “심장질환 시술시간을 단축시키고 성공률을 높일 수 있다”고 말했다.
이번 연구결과는 지난 13일 ‘소프트 로보틱스’(Soft Robotics)에 실렸다.
(서울=뉴스1)
트렌드뉴스
-
1
獨, 미군 토마호크 배치 철회에…“돈 주고 사겠다” 제안
-
2
안규백 “韓 주도 한반도 방위” 헤그세스 “위협적 환경, 美와 함께 해야”
-
3
“내 여동생이면 절대 안 시켜”…신지 결혼에 작심 발언한 변호사
-
4
한반도 땅 밑에 금광석 592만 t… ‘골드러시’ 바람 부나
-
5
“전재수 보좌진, 압수수색前 망치로 하드디스크 부숴 증거 인멸”
-
6
왜 손실 난 주식 못 팔까…개미가 빠지기 쉬운 4가지 함정
-
7
李대통령 X에 ‘기호 2번 조정식’ 논란…靑 “특정 후보와 무관”
-
8
하정우 “오빠 논란, 鄭대표가 시켜서…아 그냥 오지 말라고”
-
9
‘웃찾사’ 개그우먼, 시의원 출마했다…골키퍼-경륜선수 등 이색 후보들
-
10
붉은 팥 한 줌, 몸속 순환 깨우는 힘[정세연의 음식처방]
-
1
靑 “나무호 피격, 이란과 관련성은 현재까지 미지의 영역”
-
2
“장동혁 2선후퇴 안하면 시장후보 등록 안해” 남양주 주광덕 요구
-
3
李 “갭투자 허용 주장은 ‘억까’…세 낀 1주택자도 매도 기회 준것”
-
4
“우리 애 멀미했다고 민원” 현장학습 거부하며 울먹인 교사
-
5
“승객 47%가 공짜”…노인 무임승차 비율 최고 지하철역은?
-
6
“드론인지 미사일인지 추가 조사 필요… 내부 깊이 7m까지 훼손”
-
7
[단독]정은경 “호스피스 확대… 내년 요양병원 본격 도입”
-
8
2차 고유가 지원금 18일부터…국민 70%에 10만~25만원
-
9
[김승련 칼럼]파병이라는 금기를 깨는 정치
-
10
삼성전자 노사, 막판 재협상… ‘반도체 적자부서 3억 성과급’ 쟁점
트렌드뉴스
-
1
獨, 미군 토마호크 배치 철회에…“돈 주고 사겠다” 제안
-
2
안규백 “韓 주도 한반도 방위” 헤그세스 “위협적 환경, 美와 함께 해야”
-
3
“내 여동생이면 절대 안 시켜”…신지 결혼에 작심 발언한 변호사
-
4
한반도 땅 밑에 금광석 592만 t… ‘골드러시’ 바람 부나
-
5
“전재수 보좌진, 압수수색前 망치로 하드디스크 부숴 증거 인멸”
-
6
왜 손실 난 주식 못 팔까…개미가 빠지기 쉬운 4가지 함정
-
7
李대통령 X에 ‘기호 2번 조정식’ 논란…靑 “특정 후보와 무관”
-
8
하정우 “오빠 논란, 鄭대표가 시켜서…아 그냥 오지 말라고”
-
9
‘웃찾사’ 개그우먼, 시의원 출마했다…골키퍼-경륜선수 등 이색 후보들
-
10
붉은 팥 한 줌, 몸속 순환 깨우는 힘[정세연의 음식처방]
-
1
靑 “나무호 피격, 이란과 관련성은 현재까지 미지의 영역”
-
2
“장동혁 2선후퇴 안하면 시장후보 등록 안해” 남양주 주광덕 요구
-
3
李 “갭투자 허용 주장은 ‘억까’…세 낀 1주택자도 매도 기회 준것”
-
4
“우리 애 멀미했다고 민원” 현장학습 거부하며 울먹인 교사
-
5
“승객 47%가 공짜”…노인 무임승차 비율 최고 지하철역은?
-
6
“드론인지 미사일인지 추가 조사 필요… 내부 깊이 7m까지 훼손”
-
7
[단독]정은경 “호스피스 확대… 내년 요양병원 본격 도입”
-
8
2차 고유가 지원금 18일부터…국민 70%에 10만~25만원
-
9
[김승련 칼럼]파병이라는 금기를 깨는 정치
-
10
삼성전자 노사, 막판 재협상… ‘반도체 적자부서 3억 성과급’ 쟁점
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0