공유하기
소금쟁이 원리 이용한 로봇 개발 성공, 탐색 임무 수행 기대
- 동아닷컴
-
입력 2015년 7월 31일 11시 32분
글자크기 설정
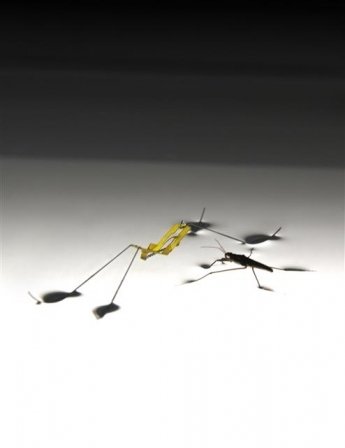
'소금쟁이 로봇'
31일 서울대 기계항공공학부 조규진·김호영 교수, 서울대 생명과학부 피오트르 야브원스키 교수, 미국 하버드대 응용과학부 로버트 우드 교수를 주축으로 한 공동연구팀은 소금쟁이가 물 위를 박차고 오르는 ‘수상 도약’ 원리를 모방한 초경량 로봇을 개발해 세계적인 과학저널 ‘사이언스’에 발표한다.
소금쟁이는 가늘고 긴 다리로 점프를 하며 물 위를 이동하기 때문에 소금쟁이가 물에 빠지지 않고 물 위를 다니는 원리에 대해 생물학자들은 물론이고 로봇 공학자들도 관심을 가져왔다.
연구팀은 이런 원리를 응용해 무게 68㎎에 실제 소금쟁이의 1.3배 크기로 다리 4개 달린 초경량 로봇을 제작할 수 있었다. 로봇 다리는 물 위에 잘 뜨도록 원통형으로 만들었고, 로봇의 근육 역할을 하는 소형 구동장치를 달아 작동할 수 있게 했다. 로봇이 작으면 작을수록 다양한 환경에서 활용이 가능한 것으로 알려졌다.
조규진 교수는 언론 인터뷰에서 “이번에 개발한 로봇은 실제 소금쟁이가 움직이는 모습과 가장 유사한 방식으로 물 위를 뛸 수 있도록 세계 최초로 구현된 것”이라면서 “재해나 오염지역에서 다양한 탐색 임무를 수행하기 위해서는 로봇을 가볍게 만드는 것이 필요하다”라고 밝혔다.
동아닷컴 도깨비뉴스 페이스북 http://www.facebook.com/DKBnews.all
트렌드뉴스
-
1
트럼프 ‘반도체 포고문’ 기습 발표…“결국 美 생산시설 지으란 것”
-
2
‘정년 65세 연장’과 맞바꾼 버스파업 철회…혈세로 비용 메워야
-
3
탄산음료 제쳤다…한국인 당 섭취식품 1위는 ‘이것’
-
4
아시안컵 8강전 가시밭길…한국 U-23 대표팀, 우승 후보 호주와 격돌
-
5
野 중진까지 “한동훈 제명 재고”에… 장동혁, 징계 10일 미뤄
-
6
美 반도체 관세 ‘포고문’에… 정부, 삼성-SK 불러 긴급회의
-
7
[단독]‘부정청약’ 조사 끝나자마자 이혜훈 장남 분가
-
8
美, 75개국 이민 비자 발급 중단…한국은 제외
-
9
李 “중국발 미세먼지 걱정 안 해” 11일만에…‘관심’ 위기경보 발령
-
10
서태평양 심해 속 고농도 희토류, 국내 과학자들이 찾았다
-
1
한동훈은 생각 없다는데…장동혁 “재심 기회 줄 것”
-
2
장동혁, 단식 돌입…“與, 공천헌금·통일교 특검 수용하라”
-
3
李대통령이 日서 신은 운동화는 75만원짜리…“수행비서 신발 빌려”
-
4
[송평인 칼럼]군 통수권자의 최소한의 자격
-
5
90분 최후진술 尹 “이런 바보가 쿠데타하나”… 책상치며 궤변
-
6
[사설]딱하고 민망했던 尹 최후진술
-
7
‘정년 65세 연장’과 맞바꾼 버스파업 철회…혈세로 비용 메워야
-
8
정청래 “약은 약사에게, 수사는 경찰에게”…수사-기소 완전분리 의지 밝혀
-
9
국힘 “이혜훈, 아들들 증여-병역 자료 제출 거부…청문회 무의미”
-
10
李 “중국발 미세먼지 걱정 안 해” 11일만에…‘관심’ 위기경보 발령
트렌드뉴스
-
1
트럼프 ‘반도체 포고문’ 기습 발표…“결국 美 생산시설 지으란 것”
-
2
‘정년 65세 연장’과 맞바꾼 버스파업 철회…혈세로 비용 메워야
-
3
탄산음료 제쳤다…한국인 당 섭취식품 1위는 ‘이것’
-
4
아시안컵 8강전 가시밭길…한국 U-23 대표팀, 우승 후보 호주와 격돌
-
5
野 중진까지 “한동훈 제명 재고”에… 장동혁, 징계 10일 미뤄
-
6
美 반도체 관세 ‘포고문’에… 정부, 삼성-SK 불러 긴급회의
-
7
[단독]‘부정청약’ 조사 끝나자마자 이혜훈 장남 분가
-
8
美, 75개국 이민 비자 발급 중단…한국은 제외
-
9
李 “중국발 미세먼지 걱정 안 해” 11일만에…‘관심’ 위기경보 발령
-
10
서태평양 심해 속 고농도 희토류, 국내 과학자들이 찾았다
-
1
한동훈은 생각 없다는데…장동혁 “재심 기회 줄 것”
-
2
장동혁, 단식 돌입…“與, 공천헌금·통일교 특검 수용하라”
-
3
李대통령이 日서 신은 운동화는 75만원짜리…“수행비서 신발 빌려”
-
4
[송평인 칼럼]군 통수권자의 최소한의 자격
-
5
90분 최후진술 尹 “이런 바보가 쿠데타하나”… 책상치며 궤변
-
6
[사설]딱하고 민망했던 尹 최후진술
-
7
‘정년 65세 연장’과 맞바꾼 버스파업 철회…혈세로 비용 메워야
-
8
정청래 “약은 약사에게, 수사는 경찰에게”…수사-기소 완전분리 의지 밝혀
-
9
국힘 “이혜훈, 아들들 증여-병역 자료 제출 거부…청문회 무의미”
-
10
李 “중국발 미세먼지 걱정 안 해” 11일만에…‘관심’ 위기경보 발령
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0