공유하기
화물선 기다려!… ‘항구’가 달려갔다
- 동아일보
-
입력 2011년 4월 27일 03시 00분
글자크기 설정
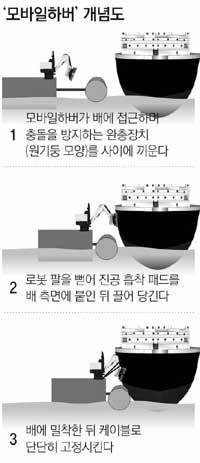
‘모바일하버’ 부산 앞바다서 로봇팔 도킹시연 성공
해상물류 새 가능성… KAIST “악천후속 성공의미”

바다 위에서 ‘모바일하버(Mobile Harbor)’와 대형 선박이 자동으로 밀착(도킹)하는 시연이 성공했다. KAIST는 26일 오후 2시 부산 영도구 한국해양대 앞바다에서 모바일하버의 자동도킹시스템으로 바지선과 3500t급 선박인 ‘한우리호’를 도킹하는 데 성공했다고 밝혔다. 바지선은 모바일하버, 한우리호는 대형 화물선의 역할을 대신했다.
KAIST가 2009년부터 개발해온 모바일하버는 배가 항구로 진입하는 기존 항구와 달리 항구가 바다에 떠 있는 배로 다가가 화물을 싣고 내리는 ‘움직이는 항구’다. 이 기술을 사용하면 항만 크기나 바다 깊이와 상관없이 대형 컨테이너선이 항구에 정박해 짐을 싣고 내릴 수 있다. 문제는 바다 위는 항상 파도가 쳐 모바일하버와 배가 계속 요동친다는 점이다. 둘이 도킹하기 직전 파도로 충돌이 일어나면 컨테이너선의 무게로 인해 큰 피해가 일어날 수 있다.
이번에 성공한 자동도킹시스템과 바다 위에서 짐을 안전하게 옮길 수 있는 ‘안정화 크레인’이 결합하면 완전한 모바일하버가 된다. 안정화 크레인은 2009년 말 KAIST 내 해양수조에서 축소 모형으로 시연에 성공한 바 있다. KAIST는 6월 29일 두 설비를 장착한 통합 모바일하버의 해상 시연을 진행할 계획이다. 곽병만 KAIST 모바일하버사업단장은 “모바일하버는 항만을 신설하거나 증설하지 않고 대형 컨테이너선의 짐을 옮길 수 있는 새로운 해상물류수단이 될 것”이라고 기대했다.
전동혁 동아사이언스 기자 jermes@donga.com
트렌드뉴스
-
1
‘미스 춘향’에 우크라이나 유학생이?…경북대 대학원 재학 중
-
2
엘베 버튼-버스 손잡이도 못 견디는 ‘오염 강박’…트럼프도 앓아
-
3
“여러분 때문에 국힘 안돼” “장동혁!”…박형준 개소식서 고성-항의
-
4
‘추다르크’ 추미애 vs ‘고졸신화’ 양향자…경기지사 ‘女대女’ 대결
-
5
“현주엽에게 학폭 당해” 인터넷에 올린 누리꾼 ‘무죄’ 확정
-
6
“3개월 통보했는데 왜 못 나가?”…전세 해지 뒤 막히는 ‘보증금’ [집과법]
-
7
‘한동훈과 단일화 할거냐’ 국힘 면접질문에…韓 “나하고만 싸우려 해”
-
8
[사설]러-중 대놓고 北 편들기… 구멍 숭숭 ‘제재의 둑’ 아예 무너질라
-
9
美, 주독미군 5000명 철수 명령…나토 보복 현실화
-
10
트럼프 “이란서 일찍 철수했다가 3년뒤 문제되게 하진 않을 것”
-
1
‘추다르크’ 추미애 vs ‘고졸신화’ 양향자…경기지사 ‘女대女’ 대결
-
2
美, 주독미군 5000명 철수 명령…나토 보복 현실화
-
3
삼바 노조 “영업익 20% 성과급” 전면파업… SK 하청도 배분 요구
-
4
삼전 노조에 뿔난 LG 노조 “비겁하고 경솔한 책임 전가…사과하라”
-
5
‘공소취소 특검법’ 앞에 똘똘 뭉치는 국힘 …“천인공노 할 짓”
-
6
李 “자기들만 살겠다고”…삼전 노조위원장 “우리 아니라 LG 얘기”
-
7
‘기관사 유니폼’ 다시 입은 고용장관…“노동의 눈 안 변해”
-
8
개소식 2곳 빼곤 연휴일정 없는 장동혁…국힘 “전략적 판단”
-
9
‘尹 어게인’ 재등판한 국힘… 대구달성 이진숙 - 하남갑 이용 공천
-
10
‘한동훈과 단일화 할거냐’ 국힘 면접질문에…韓 “나하고만 싸우려 해”
트렌드뉴스
-
1
‘미스 춘향’에 우크라이나 유학생이?…경북대 대학원 재학 중
-
2
엘베 버튼-버스 손잡이도 못 견디는 ‘오염 강박’…트럼프도 앓아
-
3
“여러분 때문에 국힘 안돼” “장동혁!”…박형준 개소식서 고성-항의
-
4
‘추다르크’ 추미애 vs ‘고졸신화’ 양향자…경기지사 ‘女대女’ 대결
-
5
“현주엽에게 학폭 당해” 인터넷에 올린 누리꾼 ‘무죄’ 확정
-
6
“3개월 통보했는데 왜 못 나가?”…전세 해지 뒤 막히는 ‘보증금’ [집과법]
-
7
‘한동훈과 단일화 할거냐’ 국힘 면접질문에…韓 “나하고만 싸우려 해”
-
8
[사설]러-중 대놓고 北 편들기… 구멍 숭숭 ‘제재의 둑’ 아예 무너질라
-
9
美, 주독미군 5000명 철수 명령…나토 보복 현실화
-
10
트럼프 “이란서 일찍 철수했다가 3년뒤 문제되게 하진 않을 것”
-
1
‘추다르크’ 추미애 vs ‘고졸신화’ 양향자…경기지사 ‘女대女’ 대결
-
2
美, 주독미군 5000명 철수 명령…나토 보복 현실화
-
3
삼바 노조 “영업익 20% 성과급” 전면파업… SK 하청도 배분 요구
-
4
삼전 노조에 뿔난 LG 노조 “비겁하고 경솔한 책임 전가…사과하라”
-
5
‘공소취소 특검법’ 앞에 똘똘 뭉치는 국힘 …“천인공노 할 짓”
-
6
李 “자기들만 살겠다고”…삼전 노조위원장 “우리 아니라 LG 얘기”
-
7
‘기관사 유니폼’ 다시 입은 고용장관…“노동의 눈 안 변해”
-
8
개소식 2곳 빼곤 연휴일정 없는 장동혁…국힘 “전략적 판단”
-
9
‘尹 어게인’ 재등판한 국힘… 대구달성 이진숙 - 하남갑 이용 공천
-
10
‘한동훈과 단일화 할거냐’ 국힘 면접질문에…韓 “나하고만 싸우려 해”
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0