공유하기
고양이 낙법서 배웠다… 3m높이서 가볍게 착지
- 동아일보
-
입력 2021년 10월 22일 03시 00분
글자크기 설정
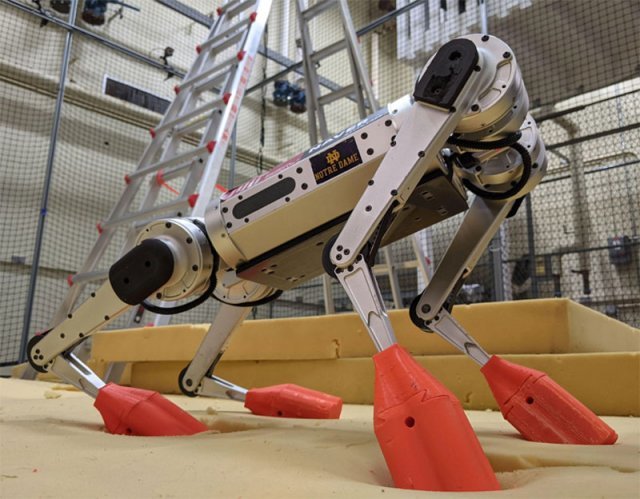
사족보행로봇 ‘미니치타’ 착지 연구
충격완충 신발 착용해 안정성 높여
어른 키를 훨씬 뛰어넘는 3m 높이에서 떨어져도 고양이처럼 사뿐히 내려앉는 로봇 기술이 개발됐다.
미국 노터데임대의 전기공학과 린 하이 교수 연구팀과 항공우주 및 기계공학과 패트릭 웬싱 교수 팀은 사족보행 로봇 ‘미니치타’의 발에 충격을 완충할 500g 무게의 신발을 신기고 인공지능(AI)을 활용해 높은 곳에서 떨어졌을 때에도 안전하게 착지하게 하는 방법을 알아냈다고 논문 사전 공개 사이트인 ‘아카이브(arXiv)’에 공개했다.
미니치타 로봇은 미국에서 활동하는 한국 과학자인 김상배 매사추세츠공대(MIT) 기계공학과 교수(네이버랩스 기술고문) 팀이 개발한 사족보행 로봇이다. 키 30cm, 무게 9kg이며 최고 초속 3.7m로 달린다. 지금까지 개발된 사족보행 로봇 중 가장 빠른 속도를 자랑하지만 높은 데서 떨어질 때는 제대로 착지하지 못한다는 한계가 있었다.
하지만 아직 고양이를 따라잡는 데는 한계가 있다. 고양이는 추락하는 동안 몸을 180도 회전하면서 균형을 잡는데, 미니치타는 최대 90도까지밖에 몸을 돌리지 못한다. 더 큰 각도로 회전하면 로봇의 몸과 다리가 서로 부딪치는 현상이 나타난다. 연구팀은 현재 2차원 시뮬레이션을 3차원으로 구현하면 이 문제도 해결할 수 있을 것으로 기대하고 있다.
미니치타 로봇이 고양이처럼 완벽한 착지 기술을 익히면 재난구조 현장은 물론이고 달 같은 미세중력 환경에서 유용하게 쓰일 것으로 기대된다.
© dongA.com All rights reserved. 무단 전재, 재배포 및 AI학습 이용 금지
트렌드뉴스
-
1
“나만 적게 드리나?”…어버이날 평균 송금액 보니
-
2
어버이날 앞두고 “독거노인께 도움되길”…현금다발 주고 떠난 시민
-
3
샤워는 매일 하는데… 수건도 한 번 쓰고 빨아야 할까?[건강팩트체크]
-
4
큰절 올리고 셀카 찍고… 한동훈 부부 첫 동반 행보
-
5
커피 효과 달랐다…디카페인은 기억력, 카페인은 집중력
-
6
트럼프, 6.7m 금빛 동상 자랑…“위대한 애국자들이 세운 것”
-
7
이란 국영매체 “韓선박에 물리적 타격”…‘나무호’ 폭발 진실은?
-
8
손으로 9세 아들 엉덩이 때린 엄마, 지인이 신고해 입건
-
9
3주택자 10년보유 ‘옥수삼성’, 12억 차익땐 양도세 4억→9.4억
-
10
폭격 견딘 이란, 봉쇄에 백기 드나…“경제 무너져 물가 60% 폭등”
-
1
국회, 개헌안 ‘투표 불성립’…국힘 불참에 정족수 미달
-
2
김정은 ‘핵 사용 위임권’도 北헌법 명시… 자동 핵타격 근거 마련
-
3
[김순덕 칼럼]장동혁 심판이냐, ‘공소취소’ 심판이냐
-
4
민주 지지율 48→46%, 국힘 15→18%…공소취소 논란 반영된 듯
-
5
국힘 “李 국무회의서 ‘비읍 시옷’ 내뱉어…국민들 경악”
-
6
“놀이공원 패스권, 서민 박탈감 대통령이 막아달라” 호소글 논란
-
7
큰절 올리고 셀카 찍고… 한동훈 부부 첫 동반 행보
-
8
폭격 견딘 이란, 봉쇄에 백기 드나…“경제 무너져 물가 60% 폭등”
-
9
이란 국영매체 “韓선박에 물리적 타격”…‘나무호’ 폭발 진실은?
-
10
트럼프 “이란 핵무기 포기 동의했다…농축우라늄 美로 보낼것”
트렌드뉴스
-
1
“나만 적게 드리나?”…어버이날 평균 송금액 보니
-
2
어버이날 앞두고 “독거노인께 도움되길”…현금다발 주고 떠난 시민
-
3
샤워는 매일 하는데… 수건도 한 번 쓰고 빨아야 할까?[건강팩트체크]
-
4
큰절 올리고 셀카 찍고… 한동훈 부부 첫 동반 행보
-
5
커피 효과 달랐다…디카페인은 기억력, 카페인은 집중력
-
6
트럼프, 6.7m 금빛 동상 자랑…“위대한 애국자들이 세운 것”
-
7
이란 국영매체 “韓선박에 물리적 타격”…‘나무호’ 폭발 진실은?
-
8
손으로 9세 아들 엉덩이 때린 엄마, 지인이 신고해 입건
-
9
3주택자 10년보유 ‘옥수삼성’, 12억 차익땐 양도세 4억→9.4억
-
10
폭격 견딘 이란, 봉쇄에 백기 드나…“경제 무너져 물가 60% 폭등”
-
1
국회, 개헌안 ‘투표 불성립’…국힘 불참에 정족수 미달
-
2
김정은 ‘핵 사용 위임권’도 北헌법 명시… 자동 핵타격 근거 마련
-
3
[김순덕 칼럼]장동혁 심판이냐, ‘공소취소’ 심판이냐
-
4
민주 지지율 48→46%, 국힘 15→18%…공소취소 논란 반영된 듯
-
5
국힘 “李 국무회의서 ‘비읍 시옷’ 내뱉어…국민들 경악”
-
6
“놀이공원 패스권, 서민 박탈감 대통령이 막아달라” 호소글 논란
-
7
큰절 올리고 셀카 찍고… 한동훈 부부 첫 동반 행보
-
8
폭격 견딘 이란, 봉쇄에 백기 드나…“경제 무너져 물가 60% 폭등”
-
9
이란 국영매체 “韓선박에 물리적 타격”…‘나무호’ 폭발 진실은?
-
10
트럼프 “이란 핵무기 포기 동의했다…농축우라늄 美로 보낼것”
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0