공유하기
한국이 화성 분화구 내부 탐사로봇 만든다
- 동아일보
-
입력 2012년 7월 27일 03시 00분
글자크기 설정
이태식 한양대 교수팀, 2030년 목표 첨단기능 개발중
2030년 8월, 로봇 하나가 화성 분화구 밑으로 내려간다. 몸체를 자유롭게 분리할 수 있고 바퀴가 없어도 급경사를 오르내릴 수 있다.
화성 분화구 내부를 직접 탐사하는 것은 이번이 처음이다. 분화구 내부에서 인간이 거주할 수 있는 조건을 찾을 수 있을까.
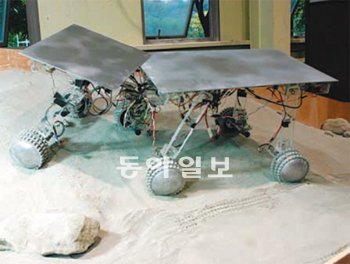
2030년 화성에서 활약할 한국형 우주로봇의 상상도다. 우리나라는 최근 1∼2년 동안 항공우주 전문가, 로봇 전문가, 토목공학자들을 중심으로 우주로봇 개발에 관심이 높아지고 있다.
NASA의 큐리오시티는 경사도가 45도인 곳을 오르내릴 수 있지만, 경사도 30도 이하인 곳만 다니도록 제한하고 있다. 자칫 로봇이 중심을 잃으면 탐사 미션 자체가 끝날 수도 있기 때문이다.
이 같은 단점을 보완하고자 이 교수팀은 몸체를 2개로 분리할 수 있는 로봇을 설계했다. 뒤쪽 몸체는 분화구 위쪽에서 지면을 굴착해 단단히 지지대를 만들고(앵커링 시스템), 앞쪽 몸체를 크레인으로 매달아 분화구 아래로 내려보낸다. 견인차가 절벽에 떨어진 자동차를 끌어올리는 것과 유사하다.
이 밖에도 용암동굴을 찾아내는 ‘지면침투레이더’, 토양 입자에 포함된 수분을 물로 바꿔주는 ‘공압수송 시스템’도 실험 중이다. 이 교수는 “NASA가 진행하는 우주 로봇 대회에 적극 참여하면서 노하우를 쌓고 있다”며 “한국형 우주로봇이 가까운 미래에 우주 탐사에 큰 역할을 하게 될 것”이라고 설명했다.
이들은 저전력 배터리 기술, 로봇의 오작동을 막는 센서 기술, 지면 1m 깊이를 탐사할 수 있는 굴착 및 원격조종 기술 등을 차례로 개발한다는 계획을 갖고 있다. 2016년 지상시험 모델 개발을 완료하고 2021년 한국형 달 탐사 로버를 제작해 2026년 행성 탐사 미션을 수행하는 것이 주요 로드맵이다.
포럼의 핵심 멤버인 박종오 전남대 로봇연구소장은 “우리나라가 후발 주자인 만큼 미국, 유럽 등 선진국의 우주로봇과 차별화해 개발하는 게 목표”라며 “좀 더 오랫동안 넓은 거리를 탐사하는 로버 개발을 추진할 계획”이라고 말했다.
과학동아 8월호에는 우리나라에서 개발 중인 로봇을 비롯해 우주탐사 로봇에 대한 상세한 소개가 실렸다.
트렌드뉴스
-
1
배우 최상엽, 이봉원·박미선 아들이었다…“성 바꿔 데뷔”
-
2
“거실에 누웠는데 뱀이”…양주 아파트 배수관 타고 들어온 듯
-
3
전원주, 보증금 10억 실버타운 보고 “계약서 가져와”
-
4
[오늘의 운세/7월 2일]
-
5
유튜버 육은영쌤, 日서 ‘어깨빵 남성’ 참교육 눈길
-
6
[단독]與, 홍명보·정몽규 불러 청문회 연다…‘감독 선임’ 추궁
-
7
“배재고 앞 근조화환 발로 뻥…재학생 반성 안해” 주장글 확산
-
8
“부정선거 없었다” 47% “있었다” 42%…20·30대는 ‘있었다’가 많아
-
9
“주사 한 번에 관절염 회복”…美 연구진 새 치료법 개발 [노화설계]
-
10
선관위, 이제서야 “투표지 100% 인쇄”… 노태악 “배우자 출장비 반납”
-
1
李 “압력 넣는다고 옮기는 기업 어딨나…그런 생각이 구태”
-
2
“스벅 가야지” 배재고, 6개월 출전정지…“선수는 조사뒤 심의”
-
3
“배재고 앞 근조화환 발로 뻥…재학생 반성 안해” 주장글 확산
-
4
한동훈 “배재고 잘못했지만, 스벅도 영업정지 안 당해…징계 과도”
-
5
李, 박정희·DJ 언급하며 “3대 메가 프로젝트는 역사적 결단”
-
6
[단독]“호남 최대 태양광 발전, 0~6시 전력공급 0.01%”
-
7
광주 반도체 단지에 주52시간 완화 검토
-
8
한국사 강사 최태성, 배재고 논란에 “저 자신 부끄러워”
-
9
‘광주 팹’ 주52시간 완화 검토…세제-금융-인허가 원스톱 지원
-
10
선관위, 이제서야 “투표지 100% 인쇄”… 노태악 “배우자 출장비 반납”
트렌드뉴스
-
1
배우 최상엽, 이봉원·박미선 아들이었다…“성 바꿔 데뷔”
-
2
“거실에 누웠는데 뱀이”…양주 아파트 배수관 타고 들어온 듯
-
3
전원주, 보증금 10억 실버타운 보고 “계약서 가져와”
-
4
[오늘의 운세/7월 2일]
-
5
유튜버 육은영쌤, 日서 ‘어깨빵 남성’ 참교육 눈길
-
6
[단독]與, 홍명보·정몽규 불러 청문회 연다…‘감독 선임’ 추궁
-
7
“배재고 앞 근조화환 발로 뻥…재학생 반성 안해” 주장글 확산
-
8
“부정선거 없었다” 47% “있었다” 42%…20·30대는 ‘있었다’가 많아
-
9
“주사 한 번에 관절염 회복”…美 연구진 새 치료법 개발 [노화설계]
-
10
선관위, 이제서야 “투표지 100% 인쇄”… 노태악 “배우자 출장비 반납”
-
1
李 “압력 넣는다고 옮기는 기업 어딨나…그런 생각이 구태”
-
2
“스벅 가야지” 배재고, 6개월 출전정지…“선수는 조사뒤 심의”
-
3
“배재고 앞 근조화환 발로 뻥…재학생 반성 안해” 주장글 확산
-
4
한동훈 “배재고 잘못했지만, 스벅도 영업정지 안 당해…징계 과도”
-
5
李, 박정희·DJ 언급하며 “3대 메가 프로젝트는 역사적 결단”
-
6
[단독]“호남 최대 태양광 발전, 0~6시 전력공급 0.01%”
-
7
광주 반도체 단지에 주52시간 완화 검토
-
8
한국사 강사 최태성, 배재고 논란에 “저 자신 부끄러워”
-
9
‘광주 팹’ 주52시간 완화 검토…세제-금융-인허가 원스톱 지원
-
10
선관위, 이제서야 “투표지 100% 인쇄”… 노태악 “배우자 출장비 반납”
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개


댓글 0