공유하기
[신문과 놀자!/어린이과학동아 별별과학백과]사람처럼 촉감 느끼고, 몸속 막힌 혈관 뚫고… 진화하는 로봇 기술
- 동아일보
-
입력 2020년 6월 10일 03시 00분
글자크기 설정
인공피부 센서 장착한 휴머노이드
4mm 의료용 마이크로 로봇 등 부품 소프트웨어 기술 비약적 발전

지난해 9월 미국 로봇회사 보스턴 다이내믹스는 휴머노이드 아틀라스가 피겨스케이트 선수처럼 뛰어올라 두 다리를 찢는 영상을 공개했어요. 아틀라스는 이전에도 넘어질 뻔하다 금세 자세를 잡아 화제가 됐지요. 이처럼 힘 있게 움직이면서도 넘어지지 않는 2족 보행로봇은 처음이었죠. 박종우 서울대 기계항공공학부 교수는 “하드웨어도 정교하겠지만 각 부품을 조종하는 소프트웨어 기술도 한몫한 것”이라고 설명했어요.
○소프트웨어와 촉감으로 정교해진다! 휴머노이드
소프트웨어는 로봇의 각 관절이 어떻게 움직여야 하는지 계산해요. 관절의 수가 많을수록 로봇은 자연스럽게 행동하지만, 그만큼 계산 시간이 오래 걸려요. 이 때문에 휴머노이드는 위급한 상황에 빠르게 대처하지 못하고 넘어지기 쉬웠어요. 이 문제를 극복하기 위해 로봇학자들은 계산량을 줄이는 방법을 찾고 있어요. 박 교수는 “손가락을 구부릴 때 두 번째 관절만 움직이면 나머지는 따라 움직인다”며 “이런 성질을 로봇에도 적용하는 방법을 연구 중”이라고 말했어요.구글은 2016년부터 딥러닝을 이용해 로봇팔 수십 대에 장난감을 잡는 훈련을 시켰어요. 성공한 경우와 실패한 경우를 모두 저장해 학습시키면 로봇은 자동으로 장난감 잡는 법을 배운답니다.
하지만 로봇이 사람처럼 촉감을 느끼는 건 쉬운 일이 아니에요. 김정 KAIST 기계공학과 교수는 “사람의 손에는 촉감 수용기가 약 1만7000개 있지만, 로봇손은 비용 탓에 많아야 10여 개의 센서를 손가락 끝에만 달고 있다”며 “현재 구현된 로봇손의 촉감은 사람의 30% 수준”이라고 했어요.
이런 문제를 극복하기 위해 김 교수팀은 지난해 8월 센서 수가 적어도 넓은 범위에서 균일하게 촉감을 느낄 수 있는 인공피부를 개발했어요. 센서가 없는 곳을 눌러도 피부에 전류가 발생해 주변 센서가 눌린 위치를 알아차리지요. 2018년에는 로봇 전신에 뿌리는 액체인공피부를 개발하기도 했어요. 김 교수는 “촉감은 로봇이 어딘가 부딪혀 부서지지 않기 위해서도 필요한 감각”이라며 “로봇이 수많은 자극 중 위험한 것만 알아내는 기술도 개발돼야 한다”고 말했답니다.
○변화하는 환경엔 말랑말랑한 내가 최고! 소프트로봇
조 교수팀은 고무처럼 탄성력이 있는 소재인 탄성중합체를 종이접기 방법으로 접어 펠리컨장어가 입을 열고 피부를 늘리는 방식을 로봇에 구현했어요. 탄성중합체에 연결된 액추에이터(액체와 기체의 압력이나 전기 등을 사용해 기계를 움직이는 장치)에 공기를 불어넣자 접혀 있던 탄성중합체가 펴지면서 입을 벌릴 뿐만 아니라 탄성중합체 자체도 장어의 피부처럼 팽창됐어요. 이 방법을 응용해 해초에 숨어 있다가 1m까지 커지는 로봇 등을 만들었지요.
소프트로봇은 딱딱한 로봇에 비해 낯선 환경에 잘 적응해요. 물렁한 몸은 주변 환경에 맞게 크기와 모양이 쉽게 변하거든요. 문제는 어떻게 변할지 정확히 예측하기 어렵다는 점이에요. 관절만 회전하는 딱딱한 로봇에 비해 소프트로봇은 모양을 바꾸는 방법이 다양하고 복잡하거든요. 로봇을 생활에서 쓰려면 정밀하게 제어할 수 있어야 하므로 움직임을 쉽게 예측할 계산법을 찾아야 해요.
더 좋은 액추에이터도 필요해요. 공기를 쓰는 액추에이터는 커다란 펌프가 필요해서 소형 로봇에는 어울리지 않아요. 로봇학자들은 부피가 작은 액체를 섞어 공기를 발생시키거나, 작은 전극을 이용하는 등의 아이디어를 내고 있답니다.
○작은 세계에선 나지! 마이크로로봇
마이크로로봇은 지름이 1∼999μm(마이크로미터·1μm는 100만분의 1m)인 로봇을 뜻해요. 하지만 최 교수는 “학계에서는 1cm보다 작은 로봇을 모두 마이크로로봇이라 부른다”고 했어요. 만드는 데 비슷한 기술이 쓰이거든요. 마이크로로봇은 멤스(MEMS·‘미세전자기계시스템’을 뜻하는 영어 단어의 첫 알파벳을 뽑아 만든 단어로, 매우 작은 기계를 만드는 기술)가 나오면서 약 15년 전부터 활발히 연구되기 시작했답니다.
올 2월 최 교수는 지름 500μm, 길이 4mm의 로봇을 의료용 기구인 ‘가이드와이어’에 붙여 쓸 수 있게 만들었어요. 가이드와이어는 노폐물로 막힌 혈관을 뚫는 치료 등을 할 때 허벅지를 통해 혈관으로 직접 삽입하는 의료용 줄이에요. 여기에 붙은 로봇은 자석을 지니고 있어서 외부에서 자기력을 주면 원하는 방향으로 이동시킬 수 있지요.
현재 의사는 X선으로 환자 몸속을 촬영해 와이어를 확인하며 손 감각으로 이동시켜요. 로봇은 이런 와이어가 혈관의 갈림길도 금세 지나가도록 할 거예요. 이 외에도 최 교수는 약물을 전달하는 로봇과 몸에서 분해돼 안전하게 없어지는 로봇 등을 만들었어요. 이들이 사용되려면 사람을 대상으로 한 임상시험을 거쳐야 한답니다.
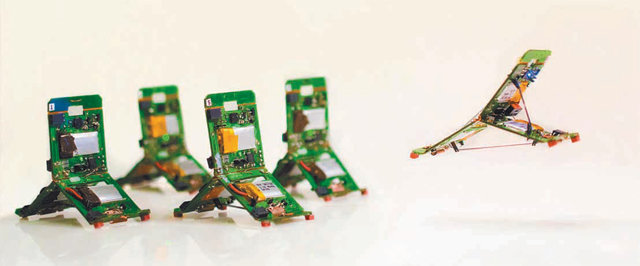
마이크로로봇은 크기가 작아 모터로 움직일 수 없어요. 그래서 자기력과 빛, 화학물질을 사용하는 등의 아이디어가 나오고 있지요. 지난해 11월에는 형상기억합금을 이용한 로봇이 발표됐어요. 주인공은 스위스 로잔연방공과대의 제이미 백 교수가 만든 ‘트라이봇’이에요. 형상기억합금은 특정 온도에서 모양이 변했다가 원래 모습을 기억해 돌아오는 금속이에요. 트라이봇은 두 다리 사이에 형상기억합금 스프링을 달았어요. 스프링이 온도에 따라 늘어나거나 줄어들면 로봇이 다리를 벌렸다 오므리는 동작을 할 수 있지요.
이다솔 어린이과학동아 기자 dasol@donga.com
이다솔 어린이과학동아 기자 dasol@donga.com
트렌드뉴스
-
1
5500만원→33억…탈북민 출신 박충권 의원, 재산 60배 뛴 비결은?
-
2
美 “지옥 열릴 것”…이란, 하르그섬 지뢰-미사일 요새화
-
3
‘성 관광지’ 오명에 日 70년만에 칼 뺐다…“매수자도 처벌”
-
4
고속버스가 안방?…발 올리고, 바닥에 누운 민폐男 눈살
-
5
이란대사 “美투자 유전 이용한 한국 선박, 호르무즈 통과 불가”
-
6
“아들 장난감 권총에 비행기 못 타”…352만 원 날린 가족 여행
-
7
“곧 쏘는 것 맞죠?”…백악관, 의문의 영상 올렸다 삭제
-
8
“시신인 줄 알고 식겁”…밭에서 나온 손 모양 정체는?
-
9
장동혁 주택 6채중 4채 처분…실거주·지역구만 남겼다
-
10
270만원짜리 ‘명품’ 비닐봉투?… 여배우의 ‘깜짝 반전’
-
1
[김순덕 칼럼]“세금으로 집값 잡지 않겠다”는 말, 진짜인 줄 알았나
-
2
정동영, ‘조선민주주의인민공화국’ 이어 ‘한조관계’ 언급
-
3
[단독]합수본 “전재수 받은 시계 785만원 까르띠에 발롱블루”
-
4
이란대사 “美투자 유전 이용한 한국 선박, 호르무즈 통과 불가”
-
5
李 지지율 69%로 취임 후 최고치…민주 46% 국힘 18%
-
6
당정 “민생지원금 선별 지급…K패스 환급률 상향 검토”
-
7
李 재산 49억… 인세-ETF 수익 등 18억 증가
-
8
김부겸, 대구시장 출마 기운듯 鄭과 회동… 주호영은 무소속 거론
-
9
장동혁 주택 6채중 4채 처분…실거주·지역구만 남겼다
-
10
고속버스가 안방?…발 올리고, 바닥에 누운 민폐男 눈살
트렌드뉴스
-
1
5500만원→33억…탈북민 출신 박충권 의원, 재산 60배 뛴 비결은?
-
2
美 “지옥 열릴 것”…이란, 하르그섬 지뢰-미사일 요새화
-
3
‘성 관광지’ 오명에 日 70년만에 칼 뺐다…“매수자도 처벌”
-
4
고속버스가 안방?…발 올리고, 바닥에 누운 민폐男 눈살
-
5
이란대사 “美투자 유전 이용한 한국 선박, 호르무즈 통과 불가”
-
6
“아들 장난감 권총에 비행기 못 타”…352만 원 날린 가족 여행
-
7
“곧 쏘는 것 맞죠?”…백악관, 의문의 영상 올렸다 삭제
-
8
“시신인 줄 알고 식겁”…밭에서 나온 손 모양 정체는?
-
9
장동혁 주택 6채중 4채 처분…실거주·지역구만 남겼다
-
10
270만원짜리 ‘명품’ 비닐봉투?… 여배우의 ‘깜짝 반전’
-
1
[김순덕 칼럼]“세금으로 집값 잡지 않겠다”는 말, 진짜인 줄 알았나
-
2
정동영, ‘조선민주주의인민공화국’ 이어 ‘한조관계’ 언급
-
3
[단독]합수본 “전재수 받은 시계 785만원 까르띠에 발롱블루”
-
4
이란대사 “美투자 유전 이용한 한국 선박, 호르무즈 통과 불가”
-
5
李 지지율 69%로 취임 후 최고치…민주 46% 국힘 18%
-
6
당정 “민생지원금 선별 지급…K패스 환급률 상향 검토”
-
7
李 재산 49억… 인세-ETF 수익 등 18억 증가
-
8
김부겸, 대구시장 출마 기운듯 鄭과 회동… 주호영은 무소속 거론
-
9
장동혁 주택 6채중 4채 처분…실거주·지역구만 남겼다
-
10
고속버스가 안방?…발 올리고, 바닥에 누운 민폐男 눈살
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개



댓글 0