사족보행로봇 ‘미니치타’ 착지 연구
충격완충 신발 착용해 안정성 높여
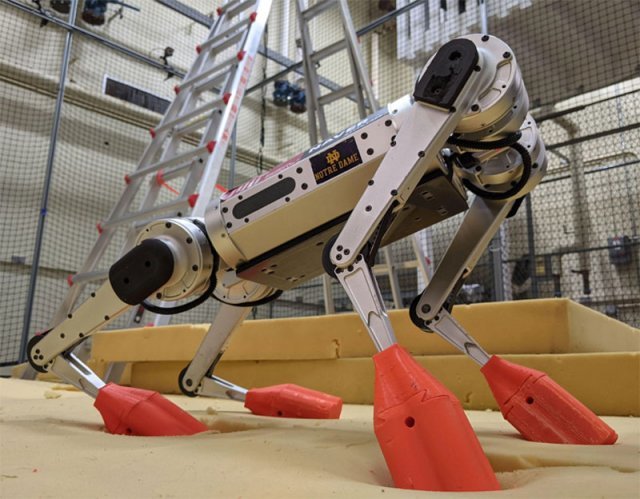
미국 노터데임대의 전기공학과 린 하이 교수 연구팀과 항공우주 및 기계공학과 패트릭 웬싱 교수 팀은 사족보행 로봇 ‘미니치타’의 발에 충격을 완충할 500g 무게의 신발을 신기고 인공지능(AI)을 활용해 높은 곳에서 떨어졌을 때에도 안전하게 착지하게 하는 방법을 알아냈다고 논문 사전 공개 사이트인 ‘아카이브(arXiv)’에 공개했다.
미니치타 로봇은 미국에서 활동하는 한국 과학자인 김상배 매사추세츠공대(MIT) 기계공학과 교수(네이버랩스 기술고문) 팀이 개발한 사족보행 로봇이다. 키 30cm, 무게 9kg이며 최고 초속 3.7m로 달린다. 지금까지 개발된 사족보행 로봇 중 가장 빠른 속도를 자랑하지만 높은 데서 떨어질 때는 제대로 착지하지 못한다는 한계가 있었다.
하지만 아직 고양이를 따라잡는 데는 한계가 있다. 고양이는 추락하는 동안 몸을 180도 회전하면서 균형을 잡는데, 미니치타는 최대 90도까지밖에 몸을 돌리지 못한다. 더 큰 각도로 회전하면 로봇의 몸과 다리가 서로 부딪치는 현상이 나타난다. 연구팀은 현재 2차원 시뮬레이션을 3차원으로 구현하면 이 문제도 해결할 수 있을 것으로 기대하고 있다.
미니치타 로봇이 고양이처럼 완벽한 착지 기술을 익히면 재난구조 현장은 물론이고 달 같은 미세중력 환경에서 유용하게 쓰일 것으로 기대된다.
이정아 동아사이언스 기자 zzunga@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개
지금 뜨는 뉴스
-

김포 공무원 또 숨진 채 발견…동료에겐 “일 못마쳐 죄송하다” 문자
- 좋아요 개
- 코멘트 개
-

“벤치에 둔 명품가방…눈앞에서 들고 도주” 범인 이틀 만에 검거
- 좋아요 개
- 코멘트 개
-
“통장 사진만 보냈을 뿐인데”…첫 출근 전에 잘린 직원
- 좋아요 개
- 코멘트 개
댓글 0