달 탐사-구난활동 등에 활용 기대
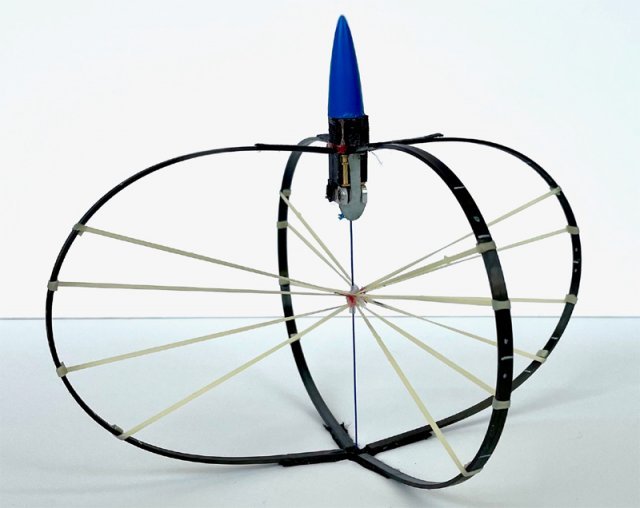
엘리엇 호크스 미국 샌타바버라 캘리포니아대 교수 연구팀은 제자리에서 32.9m를 뛰어오를 수 있는 키 30cm, 무게 30g의 소형 로봇을 개발했다고 국제학술지 ‘네이처’에 27일(현지 시간) 공개했다. 지금까지 개발된 어떤 로봇보다 뛰어난 점프력이다.
각국 로봇 연구자들은 점프 실력이 뛰어난 로봇을 만들기 위해 자연에서 힌트를 찾고 있다. 주위에 위협이 나타나면 초속 5m의 빠른 속도로 뛰어올라 순식간에 사라지는 거품벌레가 대표적이다. 이 벌레는 자기 키의 100배가 넘는 700mm를 제자리에서 뛰어오른다. 하지만 몸속에 축적된 에너지만큼만 뛰어오를 수 있다.
달에서는 중력이 지구의 6분의 1에 불과해 로봇이 최대 125m까지 뛰어오를 수 있다. 또 한 번 뛸 때마다 옆으로 약 0.5km를 이동할 수 있어 험준한 달 지형 탐사에서 실력을 발휘할 것으로 기대를 모은다. 연구팀은 또 항공기를 대체해 지구에서 지형 탐사에 사용하거나 지진이나 쓰나미 피해자를 구조하는 구난용 로봇에 응용할 수 있을 것으로 전망했다.
고재원 동아사이언스 기자 jawon1212@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개
지금 뜨는 뉴스
-
외신 “돈 되는 K팝 산업, 권력투쟁 수렁에 빠져”
- 좋아요 개
- 코멘트 개
-
우리카드, 가맹점 대표자 개인정보 7만5000건 유출…공식 사과
- 좋아요 개
- 코멘트 개
-
![[김순덕의 도발]대체 윤 대통령의 국정 비전은 뭔가](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News/124675794.1.thumb.jpg)
[김순덕의 도발]대체 윤 대통령의 국정 비전은 뭔가
- 좋아요 개
- 코멘트 개
댓글 0