美 크리스토프 케플링거 교수팀 개발
전압 걸어주면 인공근육 길이 늘어나… 같은 동작 100만번 해도 안 지쳐
작은 라즈베리 한 알 집어 옮기기도… 인간형 소프트로봇 개발 가까워져
최근 크리스토프 케플링거 미국 콜로라도볼더대 교수팀은 사람의 근육처럼 부드럽고 탄력 있게 수축·이완하면서도 사람보다 더 민첩하고 100만 번 이상 같은 동작을 반복해도 지치지 않는 소프트 인공근육(액추에이터)을 개발했다. 딱딱하고 무거운 피스톤이나 모터가 필요 없는 ‘인간형 소프트로봇’ 개발에 한 걸음 더 가까이 다가섰다는 평가다. 연구 결과는 국제학술지 ‘사이언스’와 ‘사이언스 로보틱스’ 5일자로 2편의 논문에 걸쳐 공개됐다.
소프트로봇은 부드러운 생명체의 구조와 형태, 기능을 본떠 만들거나 고무처럼 유연하고 신축성 있는 소재로 만든 로봇이다. 가오리가 헤엄치듯 말랑말랑한 몸으로 물살을 가르는 ‘가오리 로봇’, 문어처럼 여러 개의 다리를 부드럽게 움직일 수 있는 ‘문어 로봇’, 소금쟁이처럼 물 위에 앉을 수 있는 ‘소금쟁이 로봇’ 등이 대표적이다. 소프트로봇은 몸체를 유연하게 움직일 수 있기 때문에 극한 환경에서도 딱딱한 로봇으로는 하기 어려웠던 복잡하고 정교한 동작을 할 수 있다.

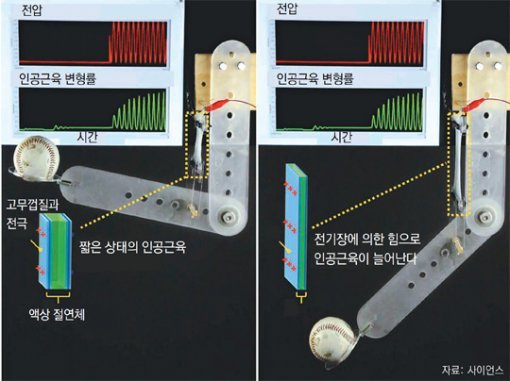
힘의 세기는 전압 세기로 조절한다. 전압을 세게 걸수록 인공근육은 더 변형되고 그만큼 더 큰 힘을 낼 수 있다. 연구진은 길이가 15cm인 두 막대 사이에 판형 인공근육 1장을 고정시킨 뒤 250g짜리 추를 매달아 시험했다. 1만 V(볼트)를 가했을 때는 수축하는 힘에 의한 인공근육의 변형률이 5%에 불과했다. 하지만 전압을 2만5000V까지 높이자 변형률이 79%까지 늘면서 추를 더 힘껏 들어올릴 수 있었다. 이 인공근육 6장을 겹쳐 사용할 경우 4kg짜리 물통을 5cm 이상 들어올리는 것도 가능했다.
연구진은 위팔과 아래팔을 인공근육으로 연결한 로봇팔도 만들어 보였다. 전압 변화에 따라 팔 안쪽의 인공근육이 수축했다 이완하면서 야구공을 든 로봇팔이 접혔다 펴졌다. 전압을 걸었다 빼는 속도를 높이면 초당 5번 이상 빠르게 인공근육을 수축·이완시킬 수도 있다. 이 인공근육을 이용해 만든 사람 손 모양의 소프트로봇으로는 날계란을 깨뜨리지 않고 집어 들거나 손가락으로 작은 라즈베리 한 알을 집어 옮기는 것도 가능했다. 케플링거 교수는 “구동전압이 높다는 점은 아직 해결해야 할 과제로 남아 있지만 이미 실험실에서 기존 대비 5분의 1 수준으로 줄였다”며 “인공근육은 평평한 도넛 모양으로도 구현 가능하기 때문에 활용도가 높다”고 말했다.
조 교수는 “완전히 생체근육과 동일하게 작동하는 소프트 인공근육이 개발되려면 좀 더 시간이 필요하겠지만, 기존 하드로봇의 한계를 뛰어넘기 위해 로봇의 여러 구성요소들이 소프트로봇으로 대체되고 있다”며 “향후 소프트로봇과 하드로봇 시스템이 상호 보완할 수 있는 하이브리드 로봇이 대세를 이룰 것”이라고 말했다.
송경은 동아사이언스 기자 kyungeun@donga.com
-
- 좋아요
- 0개
-
- 슬퍼요
- 0개
-
- 화나요
- 0개
-
- 추천해요
- 개
지금 뜨는 뉴스
-

이나영 커피 ‘맥심’ 24년 만에 모델 교체…“귀여운 이미지 박보영” 발탁
- 좋아요 개
- 코멘트 개
-
![‘친미냐 친중이냐’ 넘어 ‘한국에 최선이 될 전략은 뭐냐’ [박상준 칼럼]](https://dimg.donga.com/a/464/260/95/1/wps/NEWS/FEED/Donga_Home_News/124229348.2.thumb.png)
[박상준 칼럼]‘친미냐 친중이냐’ 넘어 ‘한국에 최선이 될 전략은 뭐냐’
- 좋아요 개
- 코멘트 개
-

日, 엔화 약세에도 금리 동결…엔-달러 환율 34년만에 최고
- 좋아요 개
- 코멘트 개
댓글 0