
韓国の研究チームが、階段や壁、障害物などがある複雑な地形でも速く走れる四足歩行ロボットの技術を開発した。今後、災害現場や山岳捜索など人が投入されにくい環境に活用されるものと見られる。
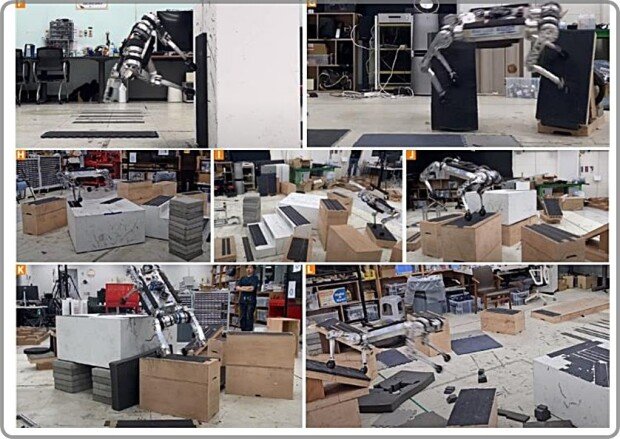
KAISTは3日、機械工学科のファンボ・ジェミン教授チームが壁や階段、飛び石など不連続な地形で時速14.4キロで走れる四足歩行ロボットのナビゲーションシステムを開発したと発表した。このシステムが採用されたロボット「ライボ」は、1.3メートル幅の間隔を跳び越え、飛び石や30度傾斜の壁を速く走るなど難しい課題を無理なくこなした。この技術は、国際学術誌「サイエンスロボティクス」の5月号に掲載された。
研究チームは、安定的なロボットの動きを具現するために、大きく2つの技術を開発した。ロボットの足が踏み出す位置を計画する「プランナー」と、足の踏み位置を正確に追う「トラッカー」だ。
プランナーは、神経網基盤の人工知能(AI)技術を活用して、物理的に可能な足の踏む位置を素早く探索し、シミュレーションを通じて最適な経路を検証できる。後ろ足が正確に前足が踏んだところを踏む猫の歩行方式に着眼し、計算の複雑度を大幅に下げることができた。
トラッカーは、生成AI技術を通じて計画された位置を正確に踏めるようにした。研究チームは、正確な回答に対して大きなご褒美を与える「強化学習」を通じて、ロボットの精度を高めた。研究チームは、ナビゲーションシステムの学習構造が、様々な障害物と不連続地形で速く歩行でき、初めて見る地形に対しても汎用的に適用可能であることを実験的に証明した。ファンボ教授は、「ロボットは、災害現場の探索や山岳捜索など、実際の任務を遂行するのに寄与するだろう」と話した。
チェ・ジウォン記者 jwchoi@donga.com





