
米防衛高等研究計画局(DARPA)が主催した地下空間探索ロボットコンテストの第1次大会で、韓国KAISTの研究チームが参加した国際研究チームが2位となった。
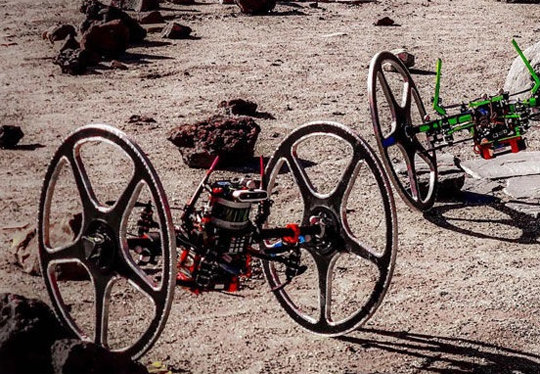
シム・ヒョンチョルKAIST電気電子工学部教授チームと米航空宇宙局(NASA)のジェット推進研究所、米カリフォルニア工科大学(カルテック)、マサチューセッツ工科大学(MIT)が参加した次世代自律型地下空間探索ロボットの研究チーム「コスタ-(CoSTAR)」が開発した群集ロボット(写真)が、8月15日から22日にかけて米ピッツバーグで開催された「DARPA地下空間探索大会」で、米カーネギーメロン大学とオレゴン州立大学連合チーム「エクスプローラー」に次いで2位となった。
DARPAでは、現在の技術水準を超える複雑で難しい技術を速やかに開発できるように、いくつかの段階で構成された複合的任務を遂行するコンテストを開く。よく「DARPAチャレンジ」と呼ばれる。韓国では2015年にオ・ジュンホKAIST教授チームが開発した「DRC-ヒューボ」がDARPAが主催した災害対応ロボット大会で優勝して有名になった。
今回の大会は、地下空間をロボットを用いて速やかに移動する技術を競う。実際にロボットを利用する分野とコンピュータシミュレーションを利用する分野がある。今回は、実際にロボットを動作させる分野で、決まった時間に地下空間の地図を正確に作成し、隠した物を発掘する能力を競う。8カ国から11チームが参加し、3年間に渡って実力を争う。
今回の参加チームには、人工の地下空間である鉱山トンネル2カ所をそれぞれ1時間以内に探索する任務が与えられた。トンネルには、それぞれ20個ずつの物が隠されているが、ロボットでこの物の位置を5メートル以内の誤差で見つければ、点数を獲得する。
DARPAによると、今大会には20台の無人機と64台のロボット、1台の飛行船が参加した。コスターチームは、重量1キロ以下の小型群集ロボットで、暗闇の中でカメラとライダー(LIDAR・レーザーレーダー)を利用して地下空間の地図を作り、通信が頻繁に途切れる深い地下空間でも通信を安定的に実行する遅延許容網(DTN)を利用して任務を遂行した。計40個の隠された物のうち11個を見つけて、25個を見つけたエクスプローラーの次となった。
ユン・シンヨン東亜サイエンス記者 ashilla@donga.com





