
韓國一研究團隊開發出了在有樓梯、牆壁、障礙物的複雜地形上也能快速奔跑的四足步行機器人技術。預計今後將用於災難現場或山嶽搜索等難以投入人力的環境。
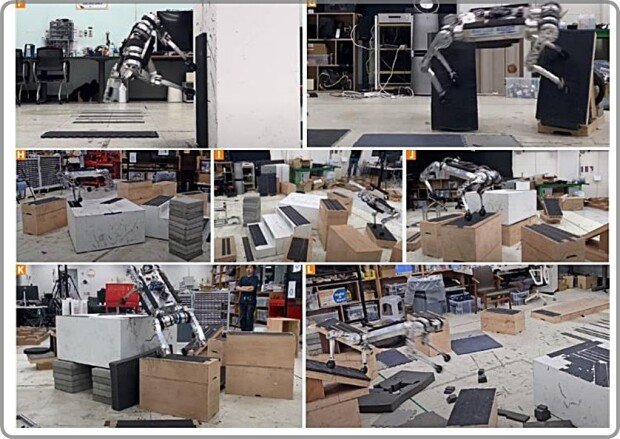
韓國科學技術院(KAIST)3日表示,機械工學系教授皇甫濟民(音)團隊開發出了在牆壁、樓梯、墊腳石橋等不連續的地形上時速可達14.4公里的四足步行機器人導航系統。適用該系統的機器人“萊博”(音)跨越1.3米寬的間隔,快速奔跑在墊腳石橋或30度傾斜的牆壁上,順利通過了艱難的課題。該技術刊登在國際學術雜誌《科學機器人》5月刊上。
研究團隊爲了實現機器人的穩定移動,主要開發了兩種技術,包括計劃機器人落腳位置的“規劃者”和準確跟隨落腳位置的“跟蹤者”。
“規劃者”利用以神經網絡爲基礎的人工智能技術,可以快速探索實質上可能的踏步位置,並通過模擬驗證最佳路徑。後腳踩在前腳踩過的地方的貓步方式上,大幅降低了計算的複雜度。
“跟蹤器”通過生成型人工智能技術,使後腳能夠準確地落在規劃的位置上。研究團隊通過大幅獎勵正確答案的“強化學習”,提高了機器人的準確度。研究團隊通過實驗證明,導航系統的學習結構可以在多種障礙物和不連續地形上快速行走,對第一次看到的地形也可以通用適用。皇甫教授表示:“機器人將爲執行災難現場探索或山嶽搜索等實際任務作出貢獻。”
崔智瑗記者 jwchoi@donga.com





