
Quadruped robot runs 14 kph on rough terrain
Quadruped robot runs 14 kph on rough terrain
Posted June. 04, 2025 07:41,
Updated June. 04, 2025 07:41
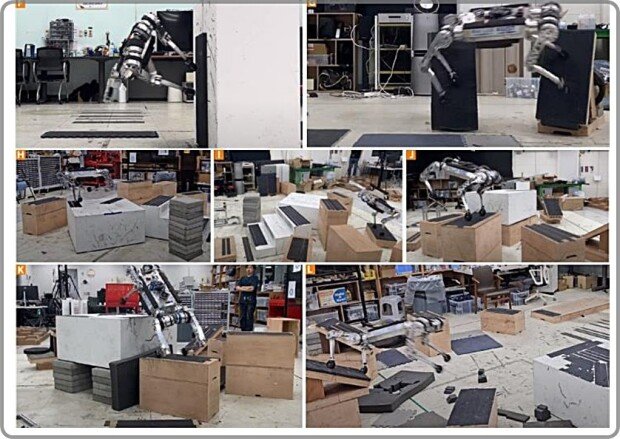
A South Korean research team has developed a quadruped robot capable of running swiftly through complex terrains such as stairs, walls, and obstacles. The robot is expected to be deployed in environments that are difficult for humans to access, such as disaster sites or mountainous regions.
On Monday, the Korea Advanced Institute of Science and Technology (KAIST) announced that Professor Hwangbo Jemin’s team from the Department of Mechanical Engineering has developed a navigation system for quadruped robots that enables high-speed movement, up to 14.4 kilometers per hour, on discontinuous terrain such as walls, stairs, and stepping stones. The robot equipped with this system, named Raibo, successfully cleared gaps up to 1.3 meters wide and sprinted over stepping stones and sloped walls with inclines as steep as 30 degrees. The research was published in the May issue of the journal Science Robotics.
To ensure stable movement, the researchers developed two key technologies: a planner that determines foot placement and a tracker that ensures accurate foot landings.
The planner uses neural network-based artificial intelligence (AI) to quickly search for physically feasible foot placement options and verifies the optimal path through simulations. Inspired by a cat’s walking pattern, where the hind feet land precisely where the forefeet stepped, the method significantly reduces computational complexity.
The tracker uses generative AI to ensure the robot’s feet land exactly where planned. The team employed reinforcement learning, which heavily rewards accurate outcomes, to enhance the robot’s precision. They experimentally demonstrated that the navigation system enables fast walking across a wide range of obstacles and discontinuous surfaces and can be adapted to unfamiliar terrain.
“This technology will contribute to real-world missions such as search and rescue operations in disaster areas and mountainous terrain,” Professor Hwangbo said.
최지원기자 jwchoi@donga.com




![[송평인 칼럼]‘주권 AI’ 먹튀 하정우](https://dimg.donga.com/c/138/175/90/1/wps/NEWS/IMAGE/2026/04/29/133838999.1.jpg)
